 生成AI
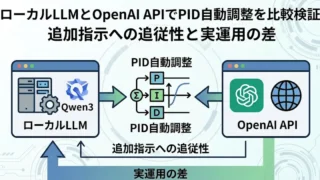
生成AI 【全コード開示】ローカルLLMとOpenAI APIでPID自動調整を比較検証 追加指示への追従性と実運用の差
ローカルLLMとOpenAI APIを使ってPID自動調整のMVP(Minimum Viable Product)を実装・比較検証した。追加指示への追従性、trial横断の指示設計、Vector XL経由の実験構成、実行時間、波形比較、実運用での選び方を整理する。
生成AI  車両診断通信
車両診断通信  車両診断通信
車両診断通信  車両診断通信
車両診断通信  車両診断通信
車両診断通信  車両診断通信
車両診断通信  車両診断通信
車両診断通信  車両診断通信
車両診断通信  車両診断通信
車両診断通信  車両診断通信
車両診断通信