G検定 G検定のカンペは禁止?「G検定 カンペ禁止」で検索する人向けに、受験規約・利用規約から読み解くNG行為(Google検索・ChatGPTは?) 「G検定 カンペ禁止」で不安な人向け。受験規約(同意画面)のカンニングNG、利用規約の漏えい禁止から安全な対応を整理。Google検索・ChatGPTの注意点も。 2026.01.22 G検定
生成AI 生成AIパスポートの禁止事項は「性格の問題」じゃない|“カンニング不安”を設計で消す方法 生成AIパスポートの禁止事項・失格条件を「いつもの癖(習慣)」として再設計。デュアル環境や“即ChatGPT”、終了ボタンの事故を、学習段階から潰す具体策を解説。 2026.01.16 生成AI
G検定 G検定が毎回「難化した!」と言われる理由:作問スタイルのズレを5軸で分解し、コサイン類似度のおもちゃモデルで理解する G検定で毎回「難化した!」と言われる理由を、作問スタイルのズレとして5軸で分解。シラバス→公式例題→ズレ耐性の最短対策も解説。 2026.01.16 G検定
G検定 G検定対策 究極カンペをつくろう#13|AIプロジェクトの進め方(CRISP-DM / CRISP-ML / PoC / BPR / MLOps ほか) G検定「AIの社会実装に向けて」対策。CRISP-DM/CRISP-ML、アジャイルとウォーターフォール、BPR・PoC・MLOpsまで、AIプロジェクトの進め方を因果関係図で整理し、PoC止まりを防いで価値創出につなげるポイントを解説します。 2026.01.10 G検定
G検定 G検定カンペの作り方まとめ|究極カンペ動画&記事バックナンバー一覧 G検定対策で使える「究極カンペ」の作り方をまとめたバックナンバー一覧です。導入編からその他シラバスのカテゴリ単位で解説する動画+記事へのリンクを整理しています。G検定究極カンペを自作したい人向けのナビゲーションページです。また究極カンペ×用語カンペの実用的な二刀流運用へのリンクも含んでいます。 2026.01.09 G検定
G検定 G検定対策 究極カンペをつくろう#12|モデルの軽量化(エッジAI・蒸留・宝くじ仮説・プルーニング・量子化) DLモデルの巨大化が招く現実制約(計算資源・遅延・電力・通信・プライバシ)から、モデル圧縮(プルーニング/量子化/蒸留/宝くじ仮説)と効果・注意点、そしてエッジAIのユースケースまでを因果で一本化して整理する。 2026.01.07 G検定
G検定 【2026年版】生成AI時代のG検定勉強法・2024シラバス攻略── 時間軸と自分事軸、それから小さな「崖」の話 ChatGPTは触っているけれどG検定テキスト第1章で挫折した人へ。G検定 シラバス 改訂 2024 に対応した2025年、2026年向けのG検定 勉強法として、「G検定 どこから 勉強するか?」に答えるシラバス攻略エッセイです。生成AI時代のG検定勉強法のコツと、おすすめの読み順サンプル・30日ミニプランを解説します。 2026.01.02 G検定
数値計算 「完全に理解した」を数式にして遊ぶ ── ダニング=クルーガー効果・ハイプサイクル・生成AIの話 ネットの「完全に理解した/何もわからない/チョットデキル」ミームを、ダニング=クルーガー効果とハイプサイクルになぞらえて、ロジスティック関数+山と谷の「おもちゃモデル」で数式化してみるエッセイです。生成AI時代の自己評価バイアスとのつながりも軽く眺めます。 2025.12.29 数値計算
G検定 【2026年度最新】G検定最新2024シラバス対応:究極カンペ×用語集カンペで合格力を高める学習法 G検定最新シラバス対応の勉強法として、「究極カンペ」と用語集カンペExcelを組み合わせた学習プロセスを具体的に解説します。 2025.12.24 G検定
G検定 【2026年対応】G検定チートシート|用語集カンペExcel無料DL(究極カンペ×二刀流) JDLA G検定最新シラバス対応の用語集カンペExcelを無料公開します。公式シラバス準拠の補助資料として「究極カンペ理論」を支えるサブノート的カンペの位置づけを解説します。 2025.12.20 G検定
 G検定 G検定
G検定 G検定  生成AI
生成AI  G検定
G検定  G検定
G検定  G検定
G検定  G検定
G検定  G検定
G検定 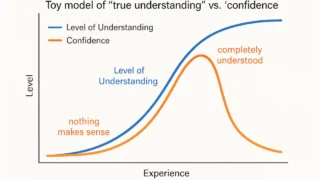 数値計算
数値計算  G検定
G検定  G検定
G検定