数値計算 数理的なエッセイ集|数理OSで世界認識をアップデートする「破壊系シリーズ」 「引用は出典リンク必須・必要最小限」「FAQ全文転載・図表転載は禁止」「社内資料/研修利用は要連絡」その他数理関連(MATLAB、Python、Scilab、Julia比較ページ)はこちら兄弟エッセイの技術的なエッセイ集兄弟エッセイ(?)創... 2026.05.22 数値計算
数値計算 AIコーディングはなぜ予想外の手を選ぶのか|Codex・Claude Code時代の spec.md / README.md 運用とベクトル合成モデル AIコーディングで予想外の実装や判断が出る理由を、ベクトル表現と候補集合の観点から解説。Codex・Claude Code運用で効く git / spec.md / README.md / AGENTS.md / CLAUDE.md の実践例を、数式とPythonの補足つきで整理する。 2026.05.17 数値計算
生成AI 【全コード開示】VOICEVOXで口パク付き会話システムを自作:OpenAI APIとLocal LLM、EngineとCoreを比較した実験記録 VOICEVOXを使った口パク付き会話システムを自作し、OpenAI APIとLocal LLM、VOICEVOX EngineとCore、ユーザー辞書、lab生成、3人会話の自動進行機能を比較した実験記録です。 2026.04.24 生成AI
生成AI 【全コード開示】ローカルLLMとOpenAI APIでPID自動調整を比較検証 追加指示への追従性と実運用の差 ローカルLLMとOpenAI APIを使ってPID自動調整のMVP(Minimum Viable Product)を実装・比較検証した。追加指示への追従性、trial横断の指示設計、Vector XL経由の実験構成、実行時間、波形比較、実運用での選び方を整理する。 2026.04.22 生成AI
数値計算 RNNで速度型PIDを拡張する|通常PID・RNN-PID風・quasi-sliding-mode付きのPython比較 RNNで速度型PIDの増分生成部を置き換える考え方を整理し、通常の速度型PID、RNN-PID風、quasi-sliding-mode付きの3系統をPythonで比較する。incremental PIDの基礎、RNNが何を学習するか、普通のスライディングモードとの違い、保護機能、既存研究との位置づけまでまとめる。 2026.04.15 数値計算
生成AI 生成AI導入を「量×質×専門距離」で設計する:出口条件E0-E2と過信防止チェックリスト 生成AI活用を量(生産性)と質(説明責任)の混入として整理し、専門距離(0-3)と実測校正で過信を抑制。出口条件をE0-E2(公開範囲・監査耐性)に段階化し、根拠リンク・反証Q・再現手順・証跡パッケージで運用可能にします。 2026.04.15 生成AI
生成AI Codex app-serverで承認つきCLI実行を制御する最小実験【Pythonサンプルコード付き】 Codex app-server を Python から起動し、承認つきでローカル CLI を扱う最小サンプルを解説します。OpenAI API 直叩きとの構造差、認証の仕組み、SDK の位置づけ、WebSocket transport、smart approvals、Agents SDK + MCP との比較、工程制御への広げ方までまとめます。 2026.04.13 生成AI
SEO 数式・コードはSEOで不利?離脱を回遊率に変える「回避+翻訳」設計(WordPress対応) 数式やコードは離脱を増やしやすくSEO的に避けられがち。ですが「読み飛ばしOK」の回避と、人間語への翻訳、WordPress詳細ブロックの退避で回遊率を改善できます。図と実験モデルで解説。 2026.03.26 SEO
数値計算 AI文章の手抜きは見抜けるか:小さく肉付けした文章と大きく削った文章が似てしまう理由 生成AIで文章が整うほど「見かけ品質」が収束し、小さく肉付けした文章と大きく削った文章が似てしまいます。肉付け・そぎ落としの非対称、見分けの手がかり(判断基準・制約・捨てた案)、ハイブリッド運用の実務ポイントを整理します。 2026.03.22 数値計算
数値計算 無断利用を批判するコンテンツが、別の無断っぽさを抱え込むとき――素材化のフラクタル構造とコンテンツ運用チェックリスト 無断利用を批判する記事や動画が、別レイヤーで同じ「無断っぽさ」を再演してしまうのはなぜか。距離とコストをざっくり式で眺めつつ、具体的なコンテンツ運用チェックリストに落とし込んで整理します。 2026.03.17 数値計算
 数値計算 数値計算
数値計算 数値計算 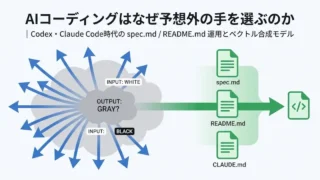 数値計算
数値計算 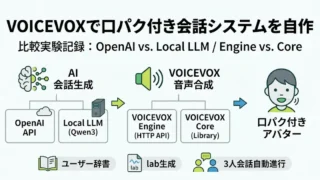 生成AI
生成AI 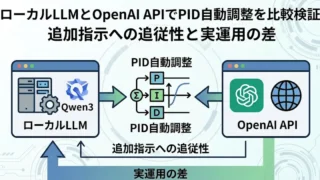 生成AI
生成AI  数値計算
数値計算  生成AI
生成AI  生成AI
生成AI  SEO
SEO  数値計算
数値計算  数値計算
数値計算