AI、データサイエンス 第1次AIブーム(推論・探索の時代) その2 行動計画 前回に「推論・探索の時代」の続き。行動計画、自動計画、プランニングという領域があるらしいので超簡単に調査&記載。ロボットの行動計画も探索で実施可能。特に古典プランニングの以下は「積み木の世界」を例とされることが多い。 2020.01.30 AI、データサイエンス
AI、データサイエンス 第1次AIブーム(推論・探索の時代) その1 探索木 前回、AIについて調べたが、もう少し詳細に部分を押さえたい。まずは各ブーム(第1次、第2次、第3次)で追ってみる。結果として各AIのレベルも一緒に把握できる今回は第1次ブームの「推論・探索の時代」をフォーカスする。しかし、最初の探索木だけでもまぁまぁボリュームなので、探索木だけに絞る。 2020.01.28 AI、データサイエンス
AI、データサイエンス 人工知能(AI)って何? 動機は凡そ以下。・自動車業界のADAS/ADの領域で必要な知識として問われる場面が多発。・流行りものなのでまずは簡単に調べてみよう。・具体的な手法等は一旦置いておいて、大雑把に把握しておきたい。先に結論を書くと以下。・定義の話はあるようで、カッチリ決まっているわけでは無い。 2020.01.27 AI、データサイエンス
gdb gdbでSPILS その2 SPILSネタの続きです。前回、SPILSでscilabからgdbに接続する構成を示しましたが、以下の構成の方が一般的です。もう一個別のgdbをgdbサーバーとして起動。scilab直下のgdbからリモートデバッグする体で接続しています。 2020.01.26 gdbscilab
gdb gdbによるISS その2 gdbをISS(インタラクションセットシミュレータ)として利用した上で、制御器の検証に応用する方法。ARM-gdbを使用。Scilabで作成した制御モデル、モータープラントモデルと連携。ELF/DWARFはソースコードファイル名や各ソースライン情報を保持している。 2020.01.22 gdbscilab
gdb gdbによるISS その1 gdbをISS(インタラクションセットシミュレータ)として利用する方法。binutils、gcc等のツールチェーンの話も。gdbのcallコマンドなどが比較的シミュレーションをする上で様々なことを可能にする。 2020.01.22 gdb
scilab scilabとRTOSのCoSimulation 後編 scilabとTOPPERS/JSPの協調シミュレーション。CoSimulationとも呼ばれ、ScilabとRTOS間にCoSimulationインターフェースを設置。それを利用して通信することで異なるシミュレーション間で連携してシミュレーションができる。 2020.01.20 scilab
scilab scilabとRTOSのCoSimulation 前編 scilabとTOPPERS/JSPの協調シミュレーション。RTOSのシミュレーションと連携。上手くつながないと連携が通らないことがある。先に正しいシミュレーション結果を持ち、随時確認しながら実装していく必要がある。 2020.01.19 scilab
scilab scilabとboost:statechartの連携(後編) scilabとboost:statechartの連携 後編です。C言語化ですが、自動化ツールがあるわけでもないので手作業になります。とはいえ、あまりにも設計と離れすぎると結局実装ミスが入り込みそうなので、boost::statechartに一番性質が近いと思われる、イベント拡張型、遷移規定型のハイブリッド 2020.01.17 scilab
 AI、データサイエンス AI、データサイエンス
AI、データサイエンス AI、データサイエンス  AI、データサイエンス
AI、データサイエンス  AI、データサイエンス
AI、データサイエンス 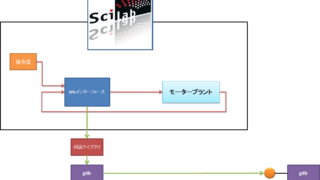 gdb
gdb 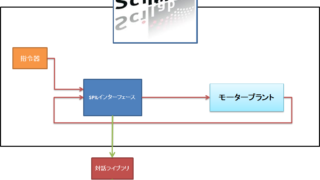 gdb
gdb 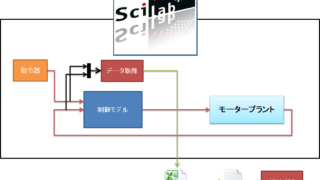 gdb
gdb  gdb
gdb 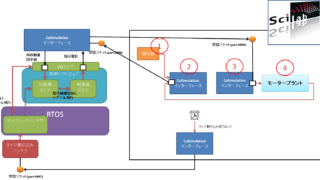 scilab
scilab 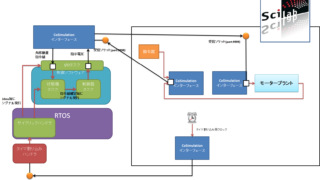 scilab
scilab 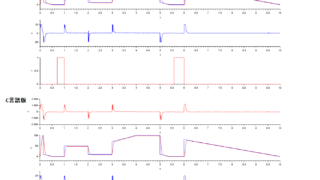 scilab
scilab