
バックナンバーはこちら。
https://www.simulationroom999.com/blog/diagnostic-communication-backnumber/

はじめに
ISO-TPのシミュレーションをしよう。のシリーズ。
CanTpを取り巻く構造などを頑張って絵に描いてみる。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
AUTOSAR CanTpのインターフェース復習
前回のAUTOSAR CanTpのインターフェースは以下だったね。
- CanTp_Transmit。
- CanTp_MainFunction。
- CanTp_RxIndication。
- CanTp_TxConfirmation。
- CanIf_Transmit。
- PduR_CanTpCopyRxData。
- PduR_CanTpCopyTxData。
- PduR_CanTpRxIndication。
- PduR_CanTpStartOfReception。
- PduR_CanTpTxConfirmation。
うん。それは覚えてるけど、イマイチ関係性が・・・。
接頭語が関係性を示してるんだっけ?
うん。
これも前回言ったけど、こんなイメージ
CanTp_:CanTpへの通知
CanIf_:CanTpからCanIfへの通知
PduR_:CanTpから上位層への通知
AUTOSAR CanTpのインターフェースを絵で表現してみた
で、頑張って絵で表現してみるって言ってけど、進捗は如何に?
(なんで偉そうなんだ?)
一応書いてきたよ。
こんなイメージだね。
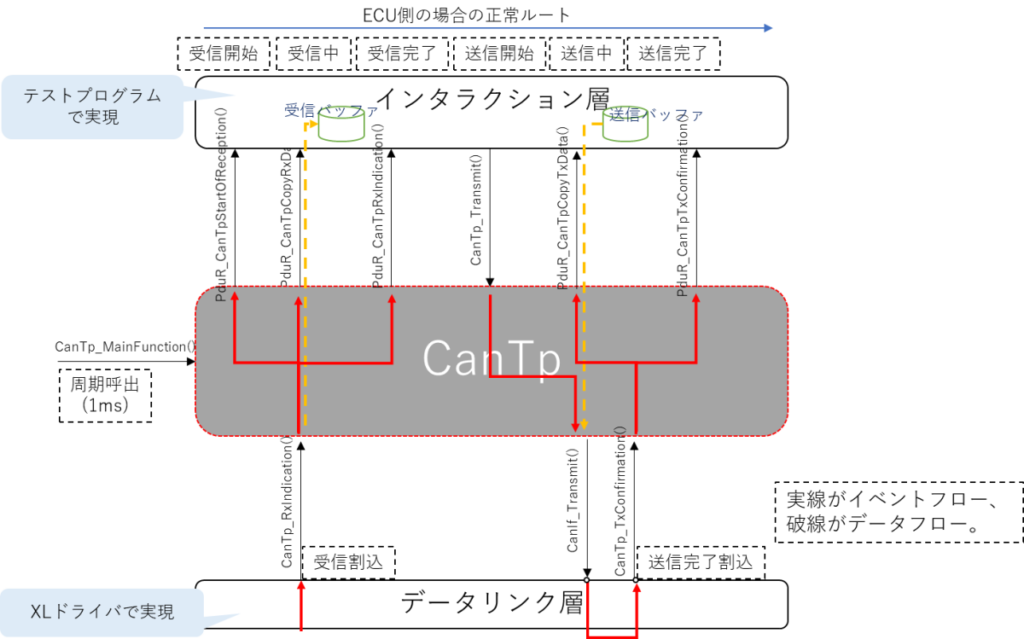
おー。なるほど。
インタラクション層ってのとデータリンク層でサンドイッチになっていたのか。
というわけで、
CanTpとCanIfことXLドライバライブラリの繋ぎ
と、
CanTpとインタラクション層の繋ぎ
の辻褄を合わせれば動作するはず。
インターフェース用のソースファイルを用意する感じかな?
それでも良いし、PduR_CanTp.hにPduR宛てのインターフェース関数がインライン関数として記載されているんで、これの中を埋めるでも良いねー。
すでにあるなら、そっちを使おうか。
CanIfの方は?
同じようにCanIf.hにインライン関数として記載されている。
お、ということは、CanTpはCanTp.h?
CanTp向けの関数の実態はCanTp.cにあって、
外部からの呼出し用のextern宣言はCanTp_Cbk.hでされてるね。
あ、そっか。
CanTp自体は実装されている物を持ってきてるから
こっちで実装する必要は無いのか。
とりあえず、各種インターフェースの繋ぎは追々やっていくとして、
あとはコンフィグレーション定義だねー。
なにそれ?
車両診断通信を実現するチャンネルの定義だね。
これはこれで結構なボリュームになるんで、次回説明かな。
(なにそれこわい)
まとめ
まとめだよ。
- AUTOSAR CanTpのインターフェースの復習。
- AUTOSAR CanTpのインターフェースを図解してみた。
- 各種インターフェースはそれぞれのヘッダファイルで定義はされている。
- シミュレーション用に辻褄合わせは必要。
バックナンバーはこちら。


コメント