モーター モーター伝達関数導出(運動方程式) ここで言う運動方程式は回転の運動方程式となる。(モーター自身は回転運動しかしないため。)イナーシャJはローターの形状、質量から算出される定数。反力T_Lは仕事させたときに初めて確定する。 2020.03.09 モーター
モーター モーター伝達関数導出(発電原理/逆起電力編) モーターの発電原理(フレミングの右手の法則)を元に逆起電力について説明が可能。磁界の中を長さlの導体が速度vで移動すると起電圧eが発生する。回転運動をしているため、速度vは回転半径rと角速度ωの乗算と等価となり、式になる。 2020.03.07 モーター
モーター モーター伝達関数導出(モーター等価回路編) キルヒホッフ第二法則、オームの法則、時間領域に於けるインダクタンスにより式で表現できる。モーター等価回路、インダクタンス、抵抗、逆起電圧。ラプラス変換によりモーター等価回路を表現する。 2020.03.07 モーター
MATLAB/Simulink Matlab/SimulinkによるモーターMILS 前回の「ScilabによるモーターMILS」のMatlab/Simulink版。慣れているということもあるが、やはりMatlab/Simulinkの方が楽。プラントモデル、制御モデル、シミュレーション結果。 2020.03.06 MATLAB/Simulinkモーター
scilab ScilabによるモーターMILS scilab/xcosで以下を実施。モーターの動特性を持ったモータープラントモデルの作成モーターといってもブラシ付きDCモーターモーターの先の負荷は一旦無視。(つまり空転状態)そのモーターを制御する制御モデルの作成さらにそれらを合体させてMILSにする。 2020.03.05 scilabモーター
 モーター モーター
モーター モーター 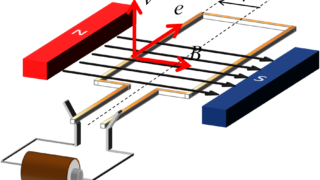 モーター
モーター 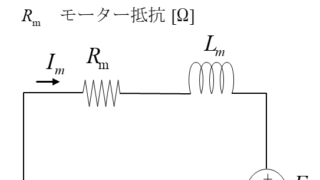 モーター
モーター 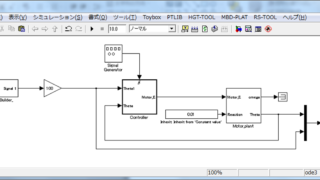 MATLAB/Simulink
MATLAB/Simulink 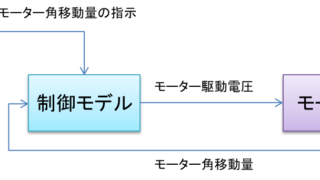 scilab
scilab