Bypass関連のタグページ。
主にXCPのよるBypass。
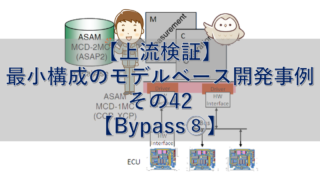
バイパスは、同期式データ収集と同期式データスティミュレーション(STIM)を同時に利用することで実装できます。
バイパス処理では、ECUとバイパスツールの間でデータを転送するために、少なくとも2つのDAQリストが必要になります。
すなわち、変数を読み取るための1つのDAQリスト(データ収集)と、変数を書き込むための1つのDAQリスト(STIM)です。
さらに、バイパス処理を制御するための特定のイベントチャンネルも必要です。
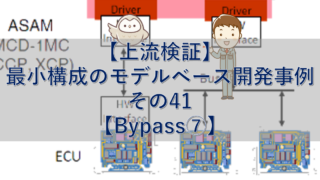
ECUでは、元の機能が実行される前に、バイパス機能の入力がサンプリングされ、DAQデータとしてバイパスツールに送信されます。
通常、バイパス機能の入力は、元の機能の入力と同じです。
バイパスツールがDAQデータのトリガーを受信すると、バイパス機能の実行が開始されます。
バイパス機能の出力は、STIMデータとしてECUに送り返されます。一方、ECUは元の機能の実行を終了します。
STIMデータは、通常、元の機能の出力を上書きすることで、ECUにフィードバックされるます。
このバイパス処理は、リアルタイムで実行されます。
したがって、DAQとSTIM通信を含むバイパスツールは、少なくともECUが元の機能を実行するのと同じ時間に実行する必要があります。
バイパスをサポートするためにECUコードを適応させることをバイパスフックと呼びます。
安全上の理由から、バイパスフックは機能する前に有効にする必要があります。
バイパスフックを有効にするメカニズムは実装ごとに異なり、XCP規格には含まれていません。
必要に応じて、特定のキャリブレーション・パラメータへの書き込みなど、XCPの手段を用いてバイパス・フックを有効にすることができます。