バックナンバーはこちら
https://www.simulationroom999.com/blog/model-based-of-minimum-backnumber/

はじめに
今回は制御対象ことプラントモデルの精度向上を考える。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
一次遅れ系おさらい
そろそろプラントモデルの精度を上げることを考えた方が良いかな。
え?
プラントモデルを修正するってこと?
いや、
モデルの修正はしないんだけど、
各係数が暫定なんで、
これを本物に近づけたいってだけ。
本物に近づけるにはどうしたらよいの?
実際の車両のステップ応答を見て
時定数を特定するのが早い。
時定数?
そういえば、
一次遅れ系の係数の中に時定数ゲインってのがいたね。
うん。
ステップ入力に対しての立ち上がり速度を決定しているパラメータで
まずはこれを特定するのが良い。
一次遅れ系をおさらいしておく。
\(a:\)時定数ゲイン
\(b:\)負帰還ゲイン
\(c:\)定常ゲイン
$$\frac{P}{A_p}=\frac{c}{as+b}$$
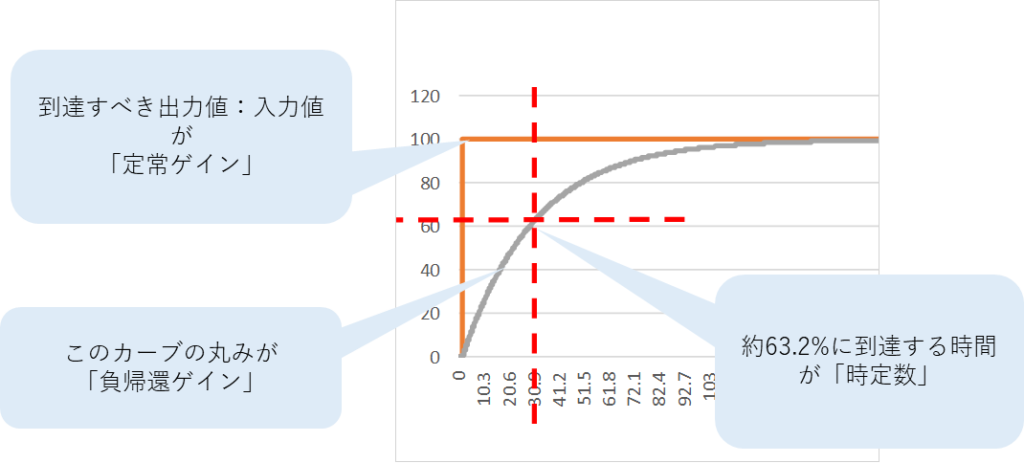
そして、ステップ応答を見た時に
到達すべき安定出力値が定常ゲイン
応答時のカーブの丸みが負帰還ゲイン
安定出力値の約63.2%あたりまでにかかる時間が時定数ゲイン
として決定する。
絵で描くとこんな感じになる。
うーん、
でも実際の車両で試すのはいきなりはできないかなぁ。
そう思って、ググってきた。
とりあえずこれで今回やってみよう。
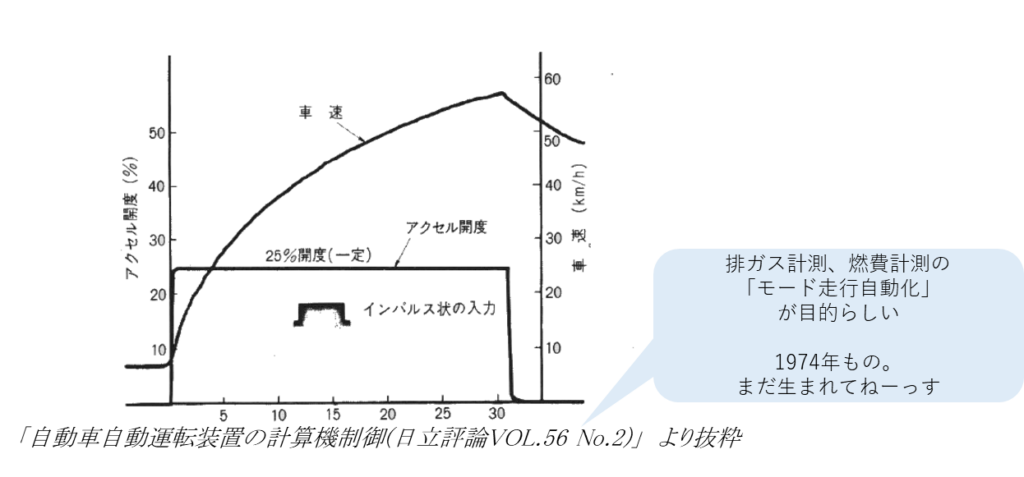
元にする車両情報
「自動車自動運転装置の計算機制御(日立評論VOL.56 No.2)」
に乗っていた特性を拝借する。
随分と古い情報だけど大丈夫?
まぁ今どきの車両の特性とは大きく異なっているとは思うが、
練習として使用する分には問題ないだろう。
パッと見の印象だが、
- 立ち上がり時定数は12秒くらい
- 立下り時定数は48秒くらい
つまり、加速時と減速時で特性が異なる。
え?そうなの?
一次遅れ系で同定してみる
試しにExcel使って同定してみよう。
手書きプロットなんでどこまでの精度になっているか分からないが
そこは今回は不問にする。
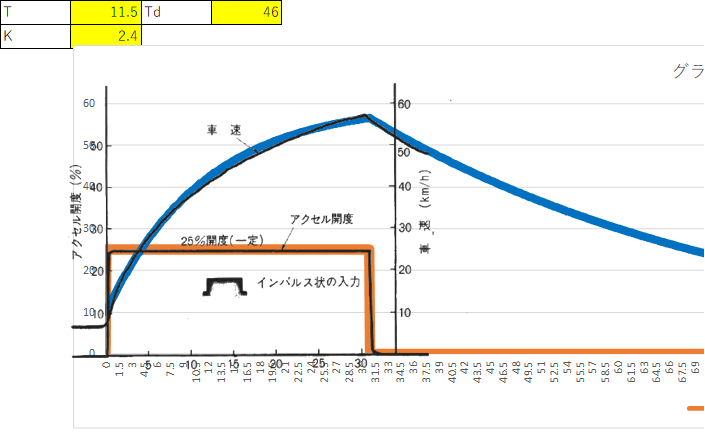
なんかいい感じで合うパラメータがあるみたいだね。
うん。
- 立ち上がり時定数は11.5
- 立下り時定数は46.0
およそ1:4の関係になるね。
でも、
立ち上がり時と立下り時にパラメータを変更ってできるの?
現状のプラントモデルだと難しいね。
加速時と減速時の判定を入れて、それぞれでパラメータを切り替える修正が必要になると思う。
じゃー、
次回はその修正ってことになるのかな?
それもあるけど、
アクセル開度と一次遅れ系に関係にあるのはあくまで出力であって、
車速ではない。
これは定常ゲインに対して効いてくるので、
次回は定常ゲインについても言及することになると思う。
何を言っているのか良く分からないけど、
とりあえず分かったよ。
まとめ
まとめだよ。
- プラントモデルの精度を上げるためには本物の動作特性が必要。
- 一次遅れ系を使っている場合、時定数と定常ゲインが重要。
- 立ち上がり時定数と立下り時定数が異なる場合がある。
- プラント出力の偏差を見て切り替えるような仕掛けが必要になる。
バックナンバーはこちら
コメント