モーター モーター伝達関数導出(分解/再構築編) 場合によって、伝達関数ブロックを使用できない局面があり得る。伝達関数の中間の帰還パラメータが変動し得る。制御モデルの推定で使用するため離散化されている必要がある場合。自前のHILSっぽい装置で、やはり離散化されている必要がある場合。 2020.03.12 モーター
SEO Google search consoleからの苦情「送信された URL に noindex タグが追加されています。」 Google search consoleから「送信された URL に noindex タグが追加されています。」と苦情がちょいちょい来ていたので一応対処したよって話。Cocoon、All in One SEOにそれぞれnoindexタグの設定項目があるので、一通りチェックするのをおすすめする。 2020.03.11 SEO
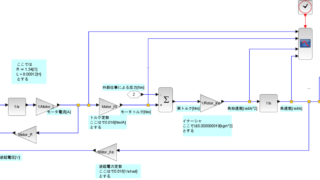
モーター モーター伝達関数導出(伝達関数編) 伝達関数「電圧→トルク→角速度→角移動量」を纏めてモデル化。電圧からトルク、トルクから角速度、角速度から角移動量。全ての変換関数を組み合わせて、Scilabでシミュレーションを実施。 2020.03.10 モーター
モーター モーター伝達関数導出(トルク発生原理編) フレミングの左手の法則より、磁界の中を長さlの導体に電流I_mを流すとローレンツ力Fが発生する。トルクは力Nとそこからの距離l[m]のクロス積(外積)。Ktはトルク定数と呼ばれるものである。モーターの発電原理で出てきた逆起電力定数K_eもBlrをまとめたものである。トルク定数Ktと逆起電力定数Keは同値になる。 2020.03.09 モーター
モーター モーター伝達関数導出(運動方程式) ここで言う運動方程式は回転の運動方程式となる。(モーター自身は回転運動しかしないため。)イナーシャJはローターの形状、質量から算出される定数。反力T_Lは仕事させたときに初めて確定する。 2020.03.09 モーター
モーター モーター伝達関数導出(発電原理/逆起電力編) モーターの発電原理(フレミングの右手の法則)を元に逆起電力について説明が可能。磁界の中を長さlの導体が速度vで移動すると起電圧eが発生する。回転運動をしているため、速度vは回転半径rと角速度ωの乗算と等価となり、式になる。 2020.03.07 モーター
モーター モーター伝達関数導出(モーター等価回路編) キルヒホッフ第二法則、オームの法則、時間領域に於けるインダクタンスにより式で表現できる。モーター等価回路、インダクタンス、抵抗、逆起電圧。ラプラス変換によりモーター等価回路を表現する。 2020.03.07 モーター
MATLAB/Simulink Matlab/SimulinkによるモーターMILS 前回の「ScilabによるモーターMILS」のMatlab/Simulink版。慣れているということもあるが、やはりMatlab/Simulinkの方が楽。プラントモデル、制御モデル、シミュレーション結果。 2020.03.06 MATLAB/Simulinkモーター
scilab ScilabによるモーターMILS scilab/xcosで以下を実施。モーターの動特性を持ったモータープラントモデルの作成モーターといってもブラシ付きDCモーターモーターの先の負荷は一旦無視。(つまり空転状態)そのモーターを制御する制御モデルの作成さらにそれらを合体させてMILSにする。 2020.03.05 scilabモーター
 モーター モーター
モーター モーター  SEO
SEO 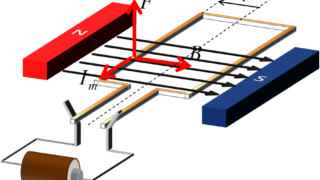 モーター
モーター 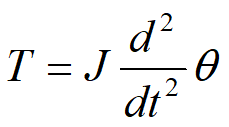 モーター
モーター 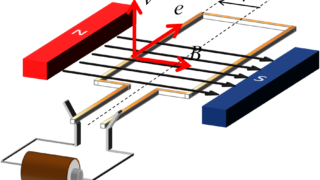 モーター
モーター 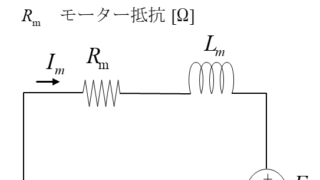 モーター
モーター 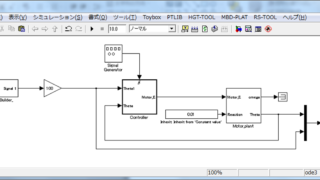 MATLAB/Simulink
MATLAB/Simulink 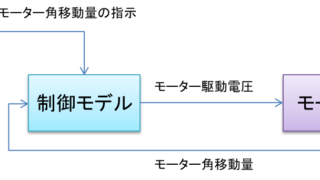 scilab
scilab