バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回で仮想ECU側のPID制御器の動作確認が取れた。
PID制御器の特性も出ており、DAQ、STIMの挙動も想定通り。
というわけで、仮想ECU側からHILSもどきの方に行きたいところだが、
ここでもう一仕事しておく必要がある。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
次はHILSもどき?
仮想ECUのPID制御器も大丈夫そうだし、
そろそろHILSもどきの方の実装かな。
いんや。
その前に一仕事残ってる。
そうなの?
仮想ECU側にまだ何かするの?
仮想ECUの方はもういじらないが、
仮想ECUから送られてくるDAQパケットだけを受信して波形表示するだけのPythonコードを用意しておきたい。
何故DAQパケットだけをモニタしたいのか?
え?
DAQパケットはHILSもどき側で受けるんじゃないの?
うん。
HILSもどきでも受けるんだけど、
HILSもどきの方はあくまでFMUの内部変数を波形表示する想定になってる。
今回追加で用意したいのは仮想ECUの内部変数を波形表示する機能を想定している。
そっか。
DAQパケットはECU側の計測値って位置づけだから
その計測値だけを表示できれば仮想ECUの内部変数を表示できてるって理屈になるのか。
構成について
理解はしてもらえたようだけど
一応、構成について図示しておこう。
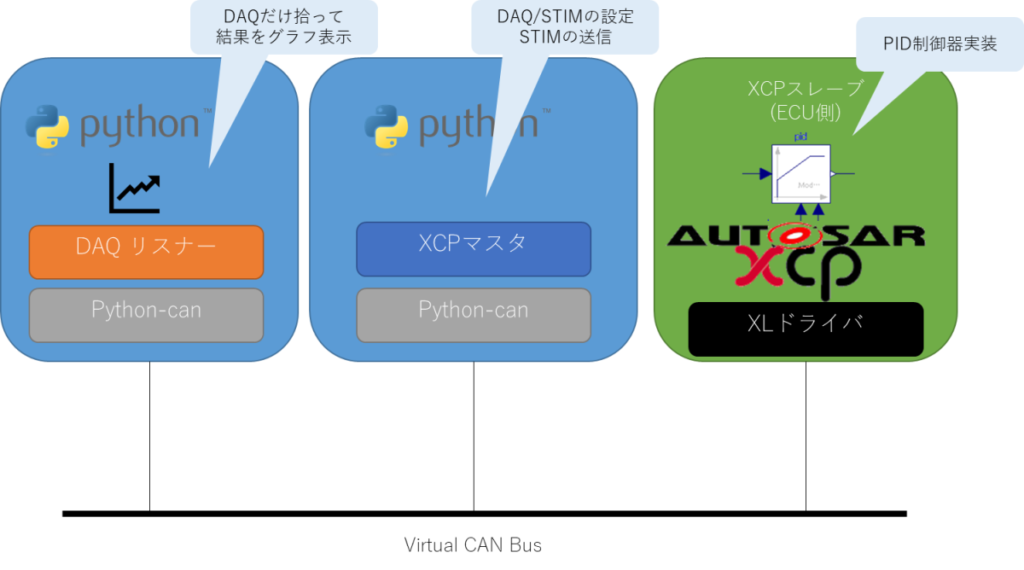
さらに論理構成としては以下になる。
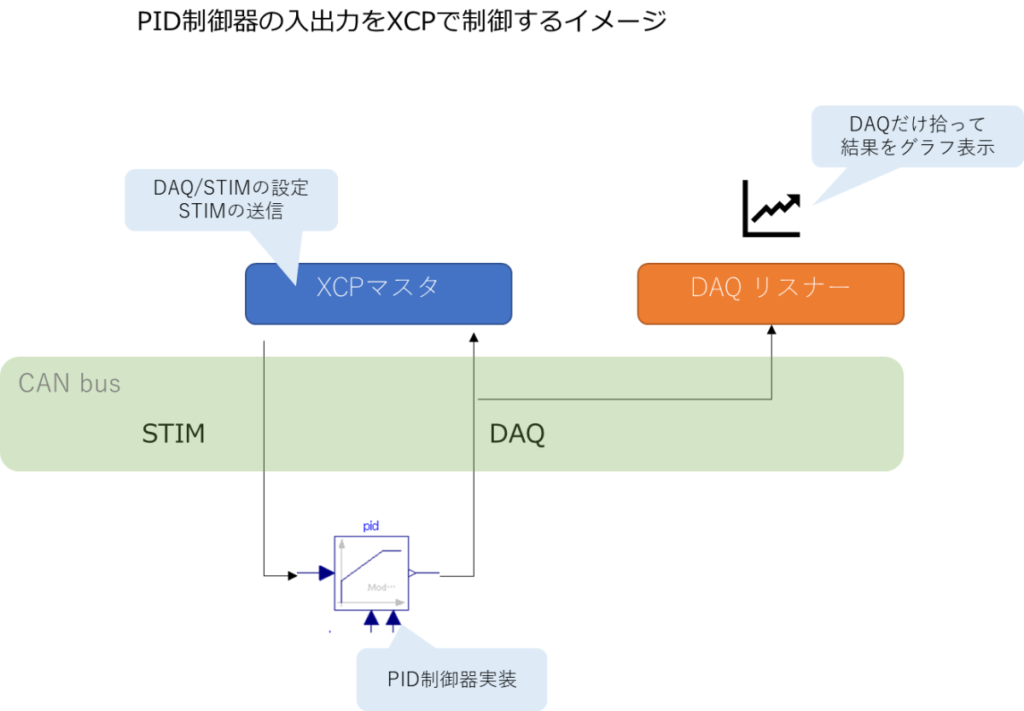
じゃー、この図の中の「DAQリスナー」ってのを作るってことだね。
そうそう。
まぁ作りとしてはCANのフレームを受信して波形表示するだけだから
それほど難しいものにはならない予定だ。
次回までにざっと作って来てしまおう。
まとめ
まとめだよ。
- HILSもどきの前にDAQパケットを取得して波形表示する機能が必要。
- 仮想ECU側の内部変数を表示することが目的。
- DAQパケットはECU側の計測値なので、内部変数と解釈しても差し支えない。
- 上記機能はDAQリスナと命名。
- DAQリスナの実験構成を図示した。
- 横からCANを覗き見るだけのシンプルな機能。
- DAQリスナの実験構成を図示した。
バックナンバーはこちら。

コメント