![[CanTp] Vehicle Diagnostic Communication Part 13 [Simulation 1]](https://www.simulationroom999.com/blog/wp-content/uploads/2022/11/01_eyecatch-10.png)
Click here for back issues.
https://www.simulationroom999.com/blog/diagnostic-communication-en-back-issue/

Introduction.
I think you are getting tired of studying, so it’s time to start running various simulations.
I will give you an overview of the situation.
I think you will get bored if all you do is study.
In the meantime, ISO-TP is finished and we have a break.
There is ISO 14229-1 on this higher level of hierarchy, and I would like to move on to explaining that one.
However, it would be better to consolidate the image of what we have learned so far.
In other words, I would like to run a simulation on a PC.
Simulation Configuration
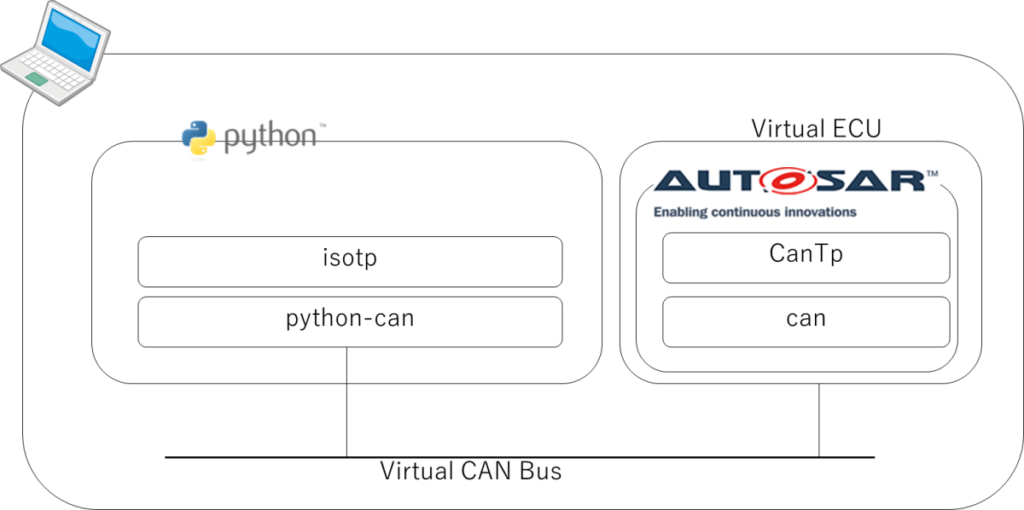
First of all, the simulation configuration is explained below.
It is depicted in the figure below.
At this stage, you will probably think it doesn’t make sense.
Therefore, I am going to explain them one by one.
First of all, the biggest question is “Vitual CAN Bus,” isn’t it?
Vitual CAN Bus” is included in a library released free of charge by Vector.
It is a mechanism to simulate in a PC with the same procedure as controlling CAN interface made by Vector.
By the way, it is different from CANoe’s simulation bus, which is a product of Vector.
The CANoe simulation bus is only for simulation within CANoe, while the Vitual CAN Bus is more like a device simulation.
And you may be interested in the keyword AUTOSAR.
Therefore, let’s start by quoting information from Wikipedia.
AUTomotive Open System ARchitecture (AUTOSAR) is a development partnership of automotive interested parties founded in 2003. It pursues the objective to create and establish an open and standardized software architecture for automotive electronic control units (ECUs). Goals include the scalability to different vehicle and platform variants, transferability of software, the consideration of availability and safety requirements, a collaboration between various partners, sustainable use of natural resources, and maintainability during the product lifecycle.
Wikipedia(https://en.wikipedia.org/wiki/AUTOSAR)
In a nutshell, it is the name of an organization and a set of specifications to develop and say “standardized ECU software component specifications”.
And the cost of purchasing the tools to build this….
There is no need to purchase anything in particular.
I am thinking of using only Python, without using Vector’s CANoe or other products.
I am the type of person who can solve anything that can be solved with money.
However, there is a trend that the Python language is beginning to be used in the automotive industry more than expected.
Therefore, this time, I would like to reproduce as much as possible in Python the parts that were made to be done in CANoe and the like.
So, I may change my policy if it doesn’t work out, as it contains some challenging content.
In that case, I apologize.
Conclusion.
- We are tired of studying and it’s time to do some simulations.
- I will also do AUTOSAR related things.
- I will also dare the challenge of using Python.
Click here for back issues.

コメント