
バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
OpenModelicaでシンプルなモデルを作ってみる。
質量と長さを持っただけの最もシンプルと思われるmassモデルを使う。
まずはモデルの配置と接続を実施する。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
使用するモデル
前回の話だとmassモデルを元にシンプルなモデルをOpenModelicaで動かすんだっけ?
そうだね。
厳密にはmassモデルと外部から「力」を加えるForce関連のモデルだね。
具体的には「constantForce」という一定に力を加えつつづけるモデルをまずは使う予定だ。
Force関連?
直線運動の話
直線運動に於いての起点となるモデルだね。
直線運動については以下を参照してみると良いだろう。


\(\vec{F} =m\vec{a}\)
を基本としたいろいろな物理量の話っぽいな・・・。
まぁ
- 加速度
- 速度
- 距離
の関係性と
- 力
- 運動量
- 仕事
- 仕事率
の関係性をふんわりと知っておけばとりあえずはOKだ。
とりあえずふんわりと把握した。
OpenModelica Connection Editorで各モデル選択
まずはOpenModelica Connection Editorの「Modelicaクラス新規作成」を選択。
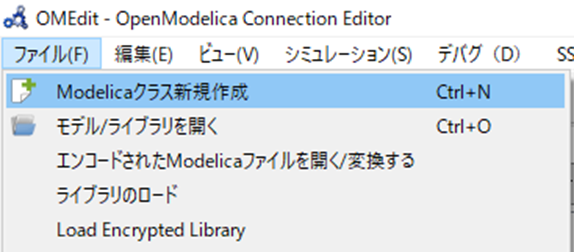
モデル名を入力して保存する。
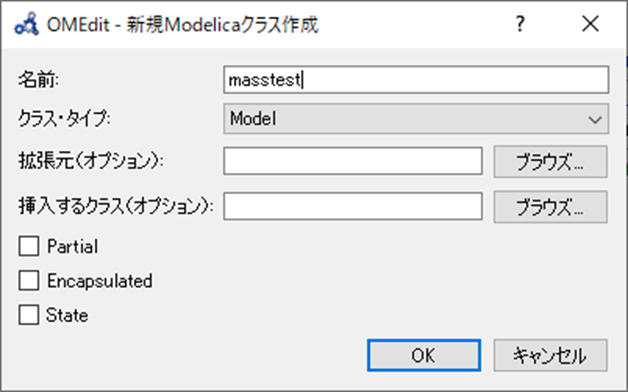
そうすると、まっさらな画面が出てくると思う。
うん。出てきた。
次に各モデルを配置するため、
左側のライブラリブラウザから
constantForceとmassのモデルをドラッグ&ドロップで持ってくる。
どこに何があるかわからん。
なんかむっちゃ一杯あるんだけど・・・。
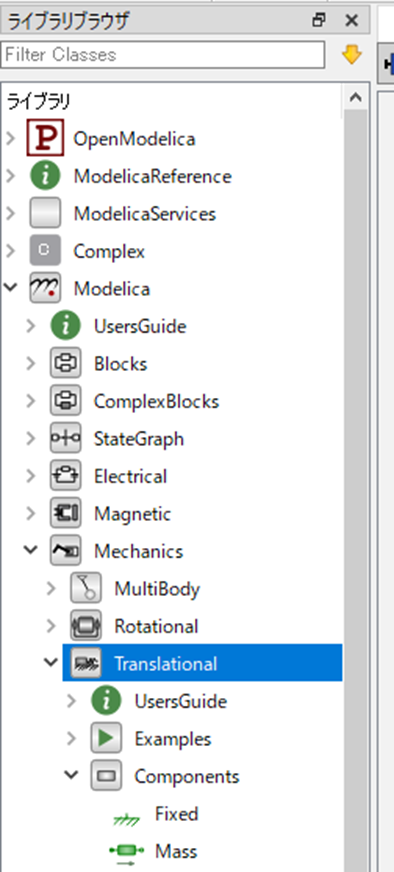
Modelica→Mechanics→Translational
以下に目的にモデルがある。
Componentsの中にMassがあって、
Sourcesの中にconstantForceがある。
あ!あった。
それを以下にように線で結ぶ。
加える力はconstantForceをダブルクリックすると変更できるんで、
\(-1[N]\)と\(2[N]\)を入れておくか。
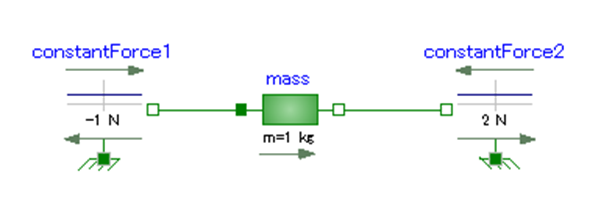
これで今回の目的となるモデルの完成だ。
なんか思ったよりもあっさりだった。
次回はこのモデルの意味合いを解説しよう。
まとめ
まとめだよ。
- 使用するモデルはMassとconstantForce。
- 直線運動をふんわり知って置いた方が良い。
- 加速度、速度、距離、力、運動量、仕事、仕事率。
- OpenModelica Connection Editorで各モデルを配置&接続
- Modelica→Mechanics→Translationalに目的のモデルがある。
バックナンバーはこちら。
コメント