
バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回はPython-CANで指令値送信のコードを提示した。
ついでに利便性目的にコマンドライン引数を取り込む機能も追加。
今回は実際に動作させて確認してみる。
(BusMasterを使用)
BusMaster

登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
Python-CANで送信
太郎くん
じゃー実際に動かしてみるよー。
結果ログ
(base) >python cansend.py
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 05 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 0a 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 0f 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 14 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 19 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 1e 00 00 00 00 00 00
# 省略
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00
Send msg : Timestamp: 0.000000 ID: 0111 S DLC: 8 00 00 00 00 00 00 00 00太郎くん
うん。
それっぽく出てるねー。
BusMasterで確認
フクさん
BusMasterの方はどう?
ちゃんとモニタ出来てる?
太郎くん
大丈夫そう。
ちゃんと動いてるよ。
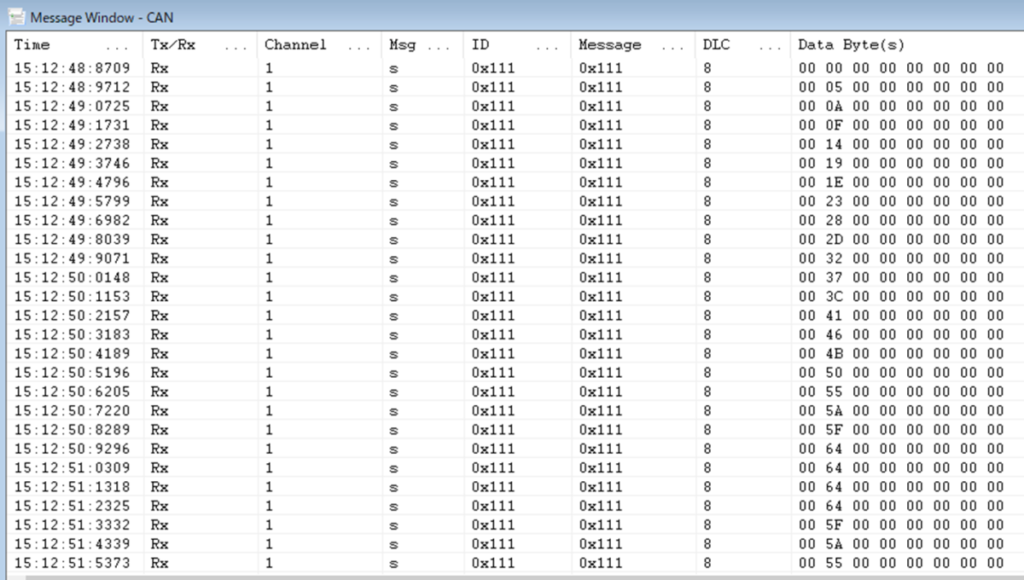
太郎くん
送信周期も大体100msってところかな?
ちょっと上振れしてるように見えるけど。
フクさん
まぁ100ms周期と言うか100ms間をSleepさせてるからね。
どうしても上振れ方向になってしまうね。
太郎くん
まぁここにそこまでの精度は求めてないからこれでもOKか。
フクさん
うん。
これで指令器側はOKとしよう。
まとめ
フクさん
まとめだよ。
- Python-CANで送信確認。
- 送信は成功している。
- BusMasterで確認。
- 送信状況はモニタできている。
- 100ms周期より若干上振れしている。
- Sleepで周期を作っているため、どうしても上振れ方向になる。
- よって、今回は気にせず指令器としてはOKとする。
- Sleepで周期を作っているため、どうしても上振れ方向になる。
バックナンバーはこちら。


コメント