
バックナンバーはこちら
https://www.simulationroom999.com/blog/model-based-motor-backnumber/

はじめに
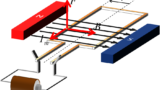
前回、太郎くんは異なる物理領域を横断するには仕事と仕事率という物理量を利用することが手っ取り早いことを知る。
しかし、仕事、仕事率同士だからと言って単純変換できるわけではない。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
電力から動力へ
では、前回のおさらいも意味も込めて、式として電力から動力に変換してみよう。
うん。
電力\(P_e\)と動力\(P_m\)として式を書くと以下になる。
\(P_e\):電力[W]
\(E\):電圧[V]
\(I\):電流[A]
\(P_m\):動力[W]
\(T\):トルク[N・m]
\(ω\):角速度[rad/sec]
$$P_e=E×I$$
$$P_m=T×ω$$
$$P_e=P_m$$
$$E×I=T×ω$$
そうそう。
これこれ。
こういうことだと思っていたのだけど違うってことなの?
実際には変換の際に損失が発生するんだよ。
というわけで以下に書き換える。
\(μ\):効率(1.0以下の数値)
$$E×I×μ=T×ω$$
あーなるほど。
全部は変換されないってことだね。
効率\(μ\)もそうだけど
トルク\(T\)と角速度\(ω\)はどう特定したらいいの?
実際に制御で使う場合、回転数で見てることが多いんだけど。。
じゃあ、
まずトルクの話をしようか。
うん。
トルクの求め方
モータトルク\(T_m\)はモータ電流\(I_m\) に比例することが証明されており、それを使用して特定する。
以下でその証明方法を書いてるよ。
と、とりあえず証明方法は抜きで、
比例していることだけ覚えておけば良い?
いいよ。
先のページにも書いていることだが、
モータ電流\(I_m\)からモータトルク\(T_m\)に変換する係数を、
トルク定数\(K_T\)と呼ぶ。
式で書くと以下だ。
\(T_m\):モータトルク[N・m]
\(K_T\):トルク定数
\(I_m\):モータ電流
$$T_m=K_T×I_m$$
なるほど。
電流が上がればトルクが上がったことになるし、
電流が下がればトルクが下がったことになるのか。
そうそう。
モータ制御をする際に、電流を見て制御制限をかけるものがある。
あれは過電流防止の意味もあるのだけど、そもそもの過電流の原因である、過剰な負荷トルクを制限する意味合いの方が強いんだ。
あー、たしかにそういうの見たことあるかも。
あれは電流を通してトルクを見ていたんだね。
そういうこと。
次は角速度かな。
角速度の求め方
ここでさっきの電力から動力への変換式を当てはめると、
\(E_m\):モータ電圧
\(ω\):角速度
$$E_m [V]×I_m [A]×μ=T_m [N・m]×ω[rad/sec]$$
$$E_m [V]×I_m [A]×μ=K_T×I_m [A]×ω[rad/sec]$$
$$E_m [V]×μ=K_T×ω[rad/sec]$$
$$ω[rad/sec]=E_m [V]×μ÷K_T$$
モーター電圧から角速度がおおよそ特定できると言える。
実際には負荷が一定であることが前提になるけど。
・・・。
電圧上げたら高回転に。
電圧下げたら低回転になる。
って覚えておけばいいよ。
よし!覚えた!!
で、角速度はわかったんだけど、回転数は?
角速度が分かったんだから回転数も分かったんだよね?
え?
え?
・・・。
じゃ、回転数の説明も。
よろしくお願いします!
回転数の求め方
モーターやエンジンなどの回転速度の表現に
「回転数」が良く出てくる。
単位は以下になる。
\(RPM → R/Min→round/min\)
(1分間に何回転するかの意)
おー。
RPMってそういう意味だったんだね。
(こいつ、マジで言ってるのか?
いままで疑問にすら思っていなかったのか・・・。)
物理量で計算する際は角速度\(ω[rad/sec]\)であることが多いため、
回転数\(N[round/min]\)との関係を示すと以下になる。
\(N\):回転数[round/min]
\(ω\):角速度[rad/sec]
$$N[round/min]=ω[rad/sec] ×60[sec/min]÷2π[rad/round]$$
何故にイキナリ円周率が・・・。
あー、弧度法を使ってるからね。
極座標系の物理量を表現する際は計算のし易さから角度の表現を度数法ではなく弧度法を使うんだ。
以下で説明しているから確認するといいよ。

・・・。
・・・以下を覚えておけばOKだよ。
\(1回転=2π[rad]\)
\(回転角θ[rad]×回転半径r[m]=回転距離l[m]\)
後でググります!
(自分で調べようとしているだけでも成長したと言えるか・・・。)
あとは効率\(μ\)なのかな。
あー、それはかなり難解なんだよね。
そーなの?
ぶっちゃけると、一般的な答えは無い。
え?
じゃーどうするのさ?!
それじゃ困るよ!!
次回までに考える。
(続くんだな。)
(ネタが思いつかなかったら
「休載のお知らせ:いままでのご声援ありがとうございました!」
だな。)
まとめ
今回のまとめだよ。
- トルクは電流に比例。
- 負荷(トルク)が一定であれば、角速度は電圧に比例。
- 角速度から回転数は求められる。
バックナンバーはこちら
コメント