バックナンバーはこちら
https://www.simulationroom999.com/blog/model-based-motor-backnumber/

はじめに
仕事率、トルク、角速度、回転数の話が終わり、残りは効率の話となる。
しかし、効率は条件よって変わることが多い上、結構難解であることが多い。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
モデルベース開発と効率\(μ\)
で、説明方法は思いついた?
(相変わらずの他力本願っぷりだなぁ)
一応。
ただし、やはり一般的な解は出ないので、
どういう要素があるかを説明していこうと思う。
がんばって!
まずはおさらい。
$$電圧E×電流I×効率μ=トルクT×角速度ω$$
2,3回前くらいに出たやつだね。
これから分かるように、モータは仕事率(電力、動力)の伝達で大よそのことが表現できる。
問題は効率\(μ\)が固定では無いところ。
効率\(μ\)はモータ都合だけで見ても0[%]~60[%]の振れ幅がある。
効率\(μ\)は様々な損失の結果として決定する値であり、
損失を特定して効率\(μ\)の精度を上げていくことがモデルベース開発の基本アプローチとなる。
あ、
元々はモデルベース開発をするために始まった話だった。
(完全に忘れていたな。タイトルにも書いてあるというのに・・・。)
効率\(μ\)を決定づける損失を特定するにはモータを回す各部品を把握する必要がある。
モータ以外も考えないといけないの?
当然だろう。
モータだけで空転させてなんか意味あるのか?
まぁ、
何かを動かしたいからモータを使うんだから、
空転じゃ意味ないよね・・・。
各種損失
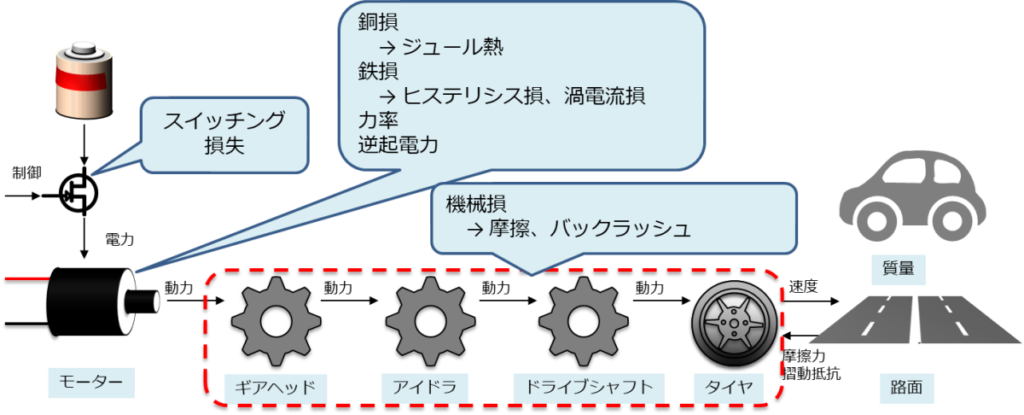
損失の種類をざっと言うとこんな感じだ。
- 電気回路
- FET等のスイッチング損失
- モータ
- 銅損
- ジュール熱
- 鉄損
- ヒステリシス損
- 渦電流損
- 力率
- 逆起電力
- 銅損
- 駆動伝達部品(ギア等)
- 機械損
- 摩擦
- バックラッシュ
- 機械損
- 外部仕事先
- 摩擦
- 摺動抵抗
ぎゃーーーーー!
あ、太郎くんが壊れた!
殺す気か!
仕方がないなー。
ちょっと絵を書いてみたよ。
なんだ。
ちゃんと絵があるじゃないか。
これを先に出してもらわないと困るよ!
(なんだろう。
これは怒ってもいいところな気がするが怒れない。
怒るアイコンが用意されて無いからだな。)
とりあえず、難解ってところはわかったよね。
うん。
これは殺人級に難解だ。
危うく殺されるところだった。
なので、いっそのこと考えないことにする。
あれ?
僕も同じこと思ったよ。
僕もやっとフクさんの領域にたどり着いたということだね!!
(怒るアイコンが欲しい。超欲しい。)
まぁどこまで精度を求めるか次第なんだよね。
精度?
求めるリアルさ
例えば、
「PID制御の応答性を確認したい」を目的とした場合、
回転数に比例した損失っぽいものがあれば、ある程度証明ができるんだ。
まぁ追従性の確認ができればOKな場合が多そうだね。
バックラッシュなんかは、
回転し始めは動力を伝達しないような不感帯を置いても良い。
バックラッシュ(Backlash, バックラッシとも呼ぶ)とは、機械に用いられる送りねじ、歯車等の互いにはまり合って運動する機械要素において、運動方向に意図して設けられた隙間の事。この隙間が無ければ歯同士が干渉し、回す事ができなくなるが、ある方向に回転していたものを反対方向に回転させた時、寸法のずれや衝撃が生じる事がある。旋盤や、フライス盤等の工作機械を使用した加工の際は、工作機械が持つバックラッシュを考慮して寸法の調整をしなければならない。
また、バックラッシュは磨耗により増大するため、振動や騒音の発生及び機械の寿命を低下させる原因となる。
Wikipediaより
わからないなりの工夫がいるってことだね。
そうそう。
「わからないけど、何かしらパラメータがあるはずだ」
って形で変数を置いておいて、
実機で動かした結果を元に後で微調整しても良い。
なるほど。
最初から全部をシミュレーションしないというものOKなんだ。
理想は全部できたら良いけど、
そこは目的だったり、
時間だったり、
お金だったり、
で取捨選択していく方が現実的だね。
よし、
一旦精度を無視した状態であれば、やれそうな気がしてきた!
そうだね。「まずはやってみる」というのも大事だね。
変にこだわると、
不要なリアルさを求め、
必要なリアルさが欠落するリスクが増えるしね。
「まずはやってみる」よ。
モチベ―ジョンが上がっているところ申し訳ないんだけど、
もうちょっとあるんだよね。
(これは次回に続くパターン!)
まとめ
今回のまとめ
- 効率\(μ\)を決定づける損失は多数存在。
- 損失は「回転数に比例する」、「回転し始めだけ不感帯が存在する」ような感じでそれっぽければ良いことが多い。
- 最初はリアルさを求めず、パラメータだけ特定して徐々にリアルさを求めても良い。
バックナンバーはこちら

コメント