バックナンバーはこちら
https://www.simulationroom999.com/blog/model-based-motor-backnumber/

はじめに
モデルベース開発に於いては、リアルさを求めることは重要だが、そのリアルさの取捨選択も重要と学んだ太郎くん。
今回はモータのスペックシートの読み方を覚えることになる。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
モータのスペックシート
早速だけど、
モータのスペックシートを見てみようか。
ちなみに、
今使ってるモータとかある?
あー、
上司に渡された本と学習キットがあるよ。
どれどれ。
マブチモータ製のFA-130RA-2270を使用しているようだね。
早速マブチモータのサイトを見てみよう。
ここに性能表ってのが載ってたよ。


最大効率時の変換効率を求める
これだけでなんかわかるの?
電圧は最大\(3.0[V]\)ってのは分かるけど。
そーだねー。
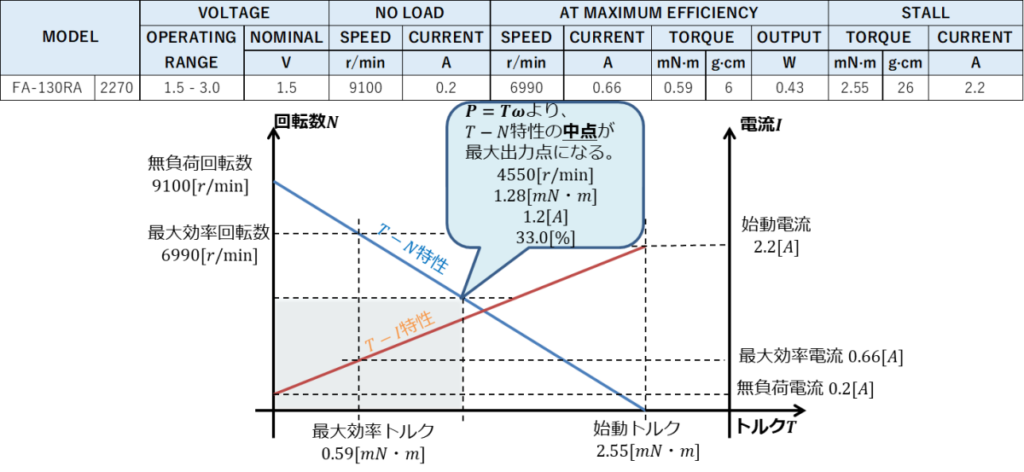
まず、AT MAXIMUM EFFICIENCYのSPEED、CURRENT、TORQUEから見てみよう。
SPEEDが\(6990[r/min]\)、
CURRENTが\(0.66[A]\)、
TQRQUEが\(0.59[mN・m]\)
ってなってるね。
これは何を表しているの?
最大効率時のトルクが、\(0.00059[N・m]\)
最大効率時の回転数が、\(6990[r/min]=6900×2π÷60[rad/sec]=722.568[rad/sec]\)
おー、
前々回の回転数と角速度の関係だね。
よって、
最大効率時の動力\(P\)は、
\(0.00059[N・m]× 722.568[rad/sec]= 0.42631512[W]\)
AT MAXIMUM EFFICIENCYのOUTPUTが\(0.43[W]\)なので、これと同等と見て良いだろう。
トルク×角速度で
極座標系の仕事率になるんだよね。
上記に加えて、
最大効率時消費電流が\(0.66[A]\)
電圧の最低定格が\(1.5[V]\)
よって、最大効率時電力は
\(0.66[A]×1.5[V]=0.99[W]\)
そして動力と電力の比率を求める。
\(0.42631512[W]÷0.99[W]=0.43062133333333335[W]\)
なんかすさまじい計算が始まっている。
このモータはどう頑張っても指令出力(電力)の\(43[\%]\)しか出力しない。
つまり、最大効率時の効率が\(43[\%]\)となる。
というような推測ができる。
ほー。
あとは、T-N特性とT-I特性かな
なにそれ?
T-N特性とT-I特性
T-N特性はトルク\(T\)と回線数\(N\)の関係性を示したもので、
T-I特性はトルク\(T\)と電流\(I\)の関係性を示したものになる。
うーん、
言葉だけだとイメージ湧かないなぁ。
いつもみたいに、
さっと絵が出てきたりしないかなぁ。
(絵を書くのも簡単じゃないんだけどなぁ)
一応用意したよ。
そうそう。こういうの。
トルクと電流が比例関係で、
トルクと回線数が反比例の関係になるのかー。
そういえば、トルクと電流は比例関係だって以前に聞いたねー。
あれ?
T-I特性ってちょっと浮いてない?
トルクと電流は完全な比例関係じゃないの?
トルクと電流が比例関係になるのはロータトルクと電流の場合で、
モータトルクになると、
モータの構造上の問題で若干バイアスが生じるんだ。
ちなみにロータは回転子とも言って、
モータの中で回ってる部分を指す。
回転していない方を固定子、ステータと言ったりする。
なるほどー。
今回のモータの場合、トルク定数\(K_T\)は\(0.001275\)になるね。
あー
バイアスが\(0.2[V]\)だから、
トルクと電流の関係が以下になるからだね?
$$T_m=K_T (I_m-0.2[A])$$
$$K_T=\displaystyle \frac{T_m}{I_m-0.2[A]}$$
そして、最大トルクが\(2.55[mN・m]\)で、その時の電流が\(2.2[A]\)だから、
$$K_T=\displaystyle \frac{0.00255[mN・m]}{2.2[A]-0.2[A]}$$
$$K_T=0.001275$$
大正解。
まぁ特性に関しては、
温度とか劣化とかで変化するものなので、
完全に理論通りとは行かないけどね。
それは良く分かる。
よく劣化推定とかの謎仕様を見かけるから、
みんな苦労してるんだろうなぁとは思ってるよ。
ついでだから、
最大効率点と最大出力点にも触れておこうか。
最大効率点と最大出力点
さぁ絵を出したまえ。
はいはい。
![トルクT[mN・m]、T-I特性[A]、T-N特性[rpm]、出力P[mW/10]、効率μ、FA-130RAモーター特性、最大効率点、最大出力点](https://www.simulationroom999.com/blog/wp-content/uploads/2020/05/04_最大効率点と最大出力点.png)
あ、
線が増えてる。
効率と出力が算出できるんだ。
その通り。
まず出力は「トルク×角速度」なので、
T-N特性が分かっていれば算出できる。
まぁ回転数から角速度に変換する必要はあるけどね。
効率は出力と電力の割合なので、電力が分かれば算出できる。
電力は「電圧×電流」で電圧は定格の1.5[V]固定として
電流はT-I特性から持ってきている。
すごいなぁ。
たったあれだけのスペックシートの情報でここまで出せるんだー。
でも、
最初の内はあんまり考えなくても良いかもね。
なんで?
これらの数値は計測困難なもので、
制御する際の直接的な目標値にはならないんだよ。
確かに、
大体回転数とか速度が目標値になってるね。
じゃあ、
どういうときに使うものなの?
目的次第だね。
例えば、
- 常に大きな仕事をするために、最大出力を維持する制御
- 建機とか。
- 保有エネルギー最大活用をするために、最大効率を維持する制御
- 電気自動車とか。
- 装置が壊れないようにするために、最大電流(トルク)を制限する制御
- パワーウィンドウとか
- 加速感を制御するために、特定電流(トルク)を維持する制御
- これも電気自動車かな?
と言う感じで目的に応じた中間的な目標値にはなり得る。
なるほど。
確かに目的次第だ!
とりあえず、
しゃべれることは全部しゃべったつもりだ。
ありがとうフクさん。
すごく勉強になったよ!
あとは、
やりながら、悩みながらでやっていくと良いよ。
うん。わかった。
まとめ
まとめだよ。
- モータのスペックシートは予想以上にあっさりしていることがあるが、それを元に様々な特性を算出できる。
- 直接計測できない物理量が算出できるが、これを制御に利用するかは目的次第。
バックナンバーはこちら

コメント